Project
Rapid
Student-led 3U CubeSat project empowering the next generation of space leaders.
Student-led 3U CubeSat project empowering the next generation of space leaders.
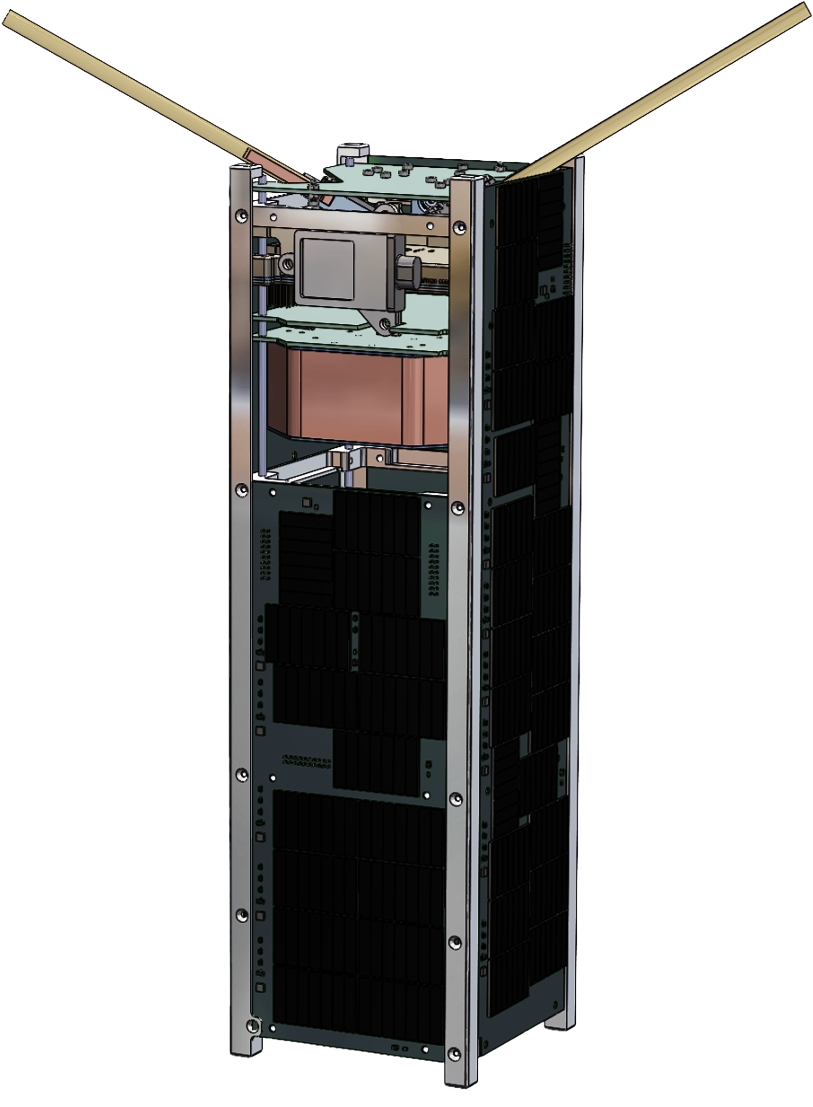
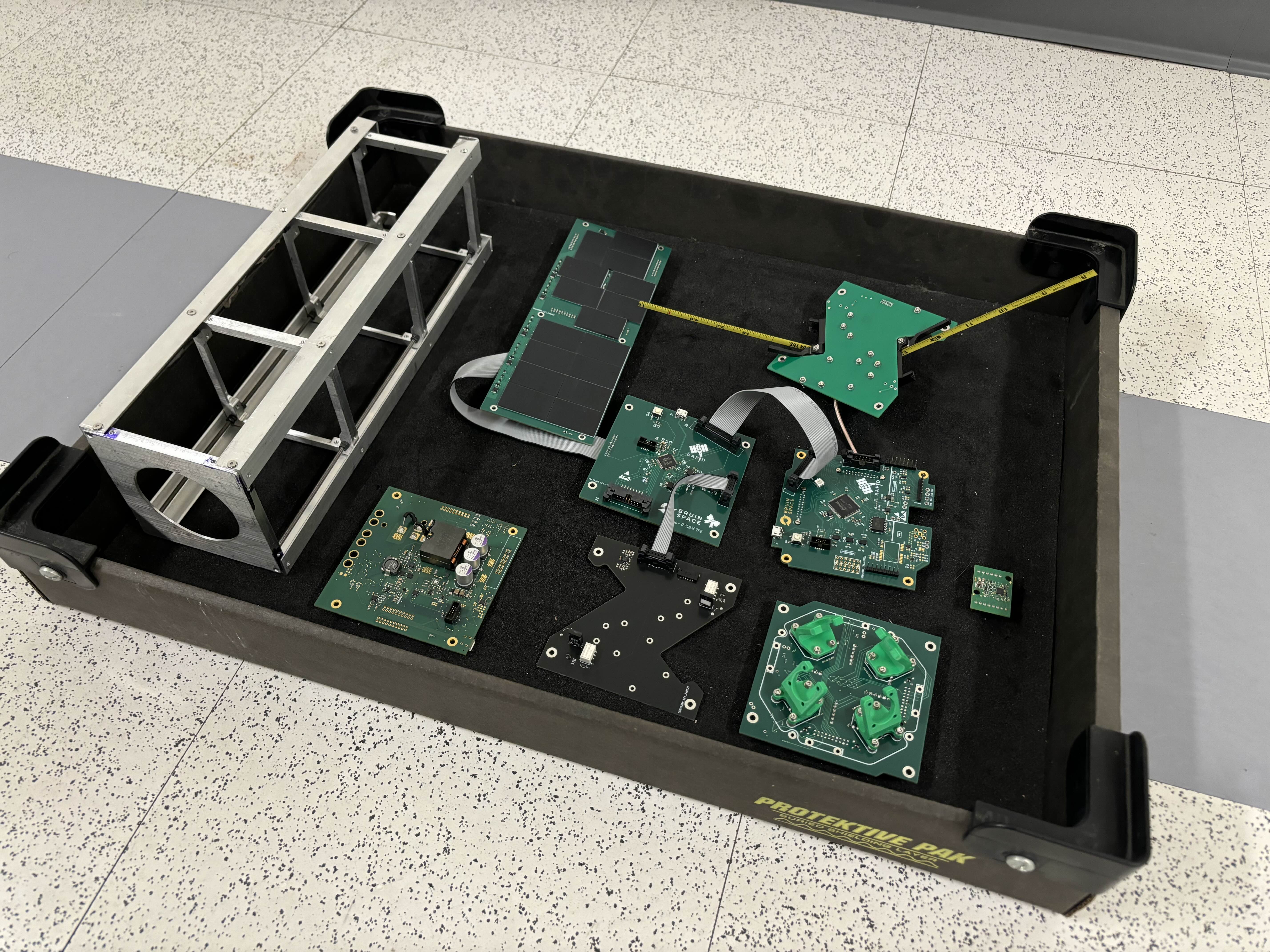
3U (100x100x330mm) chassis made of 6061 Aluminum. Designed with 1U of space for the payload.
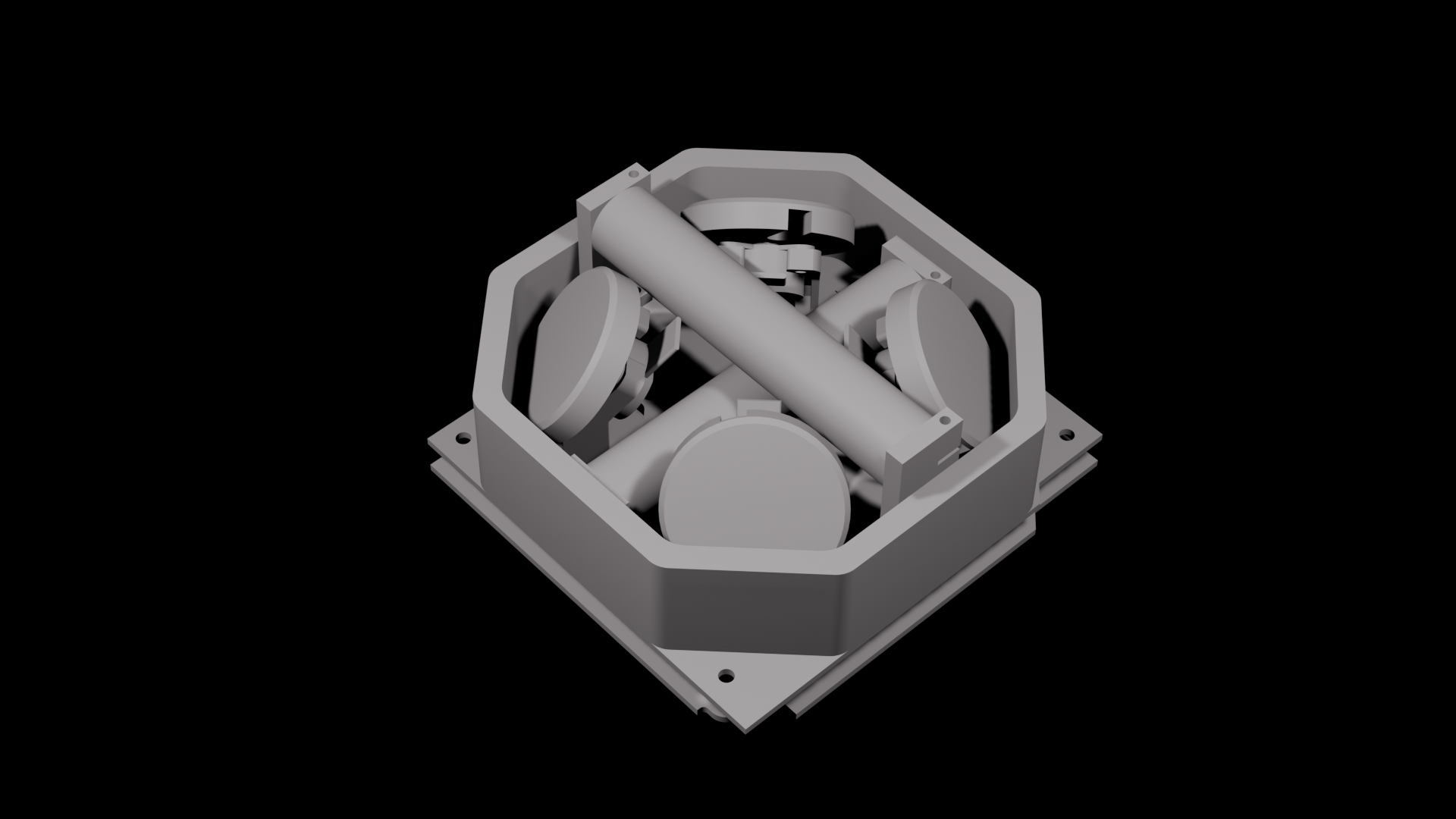
Fully custom attitude determination and control system utilizing 4 reaction wheels and 3 magnetorquers.
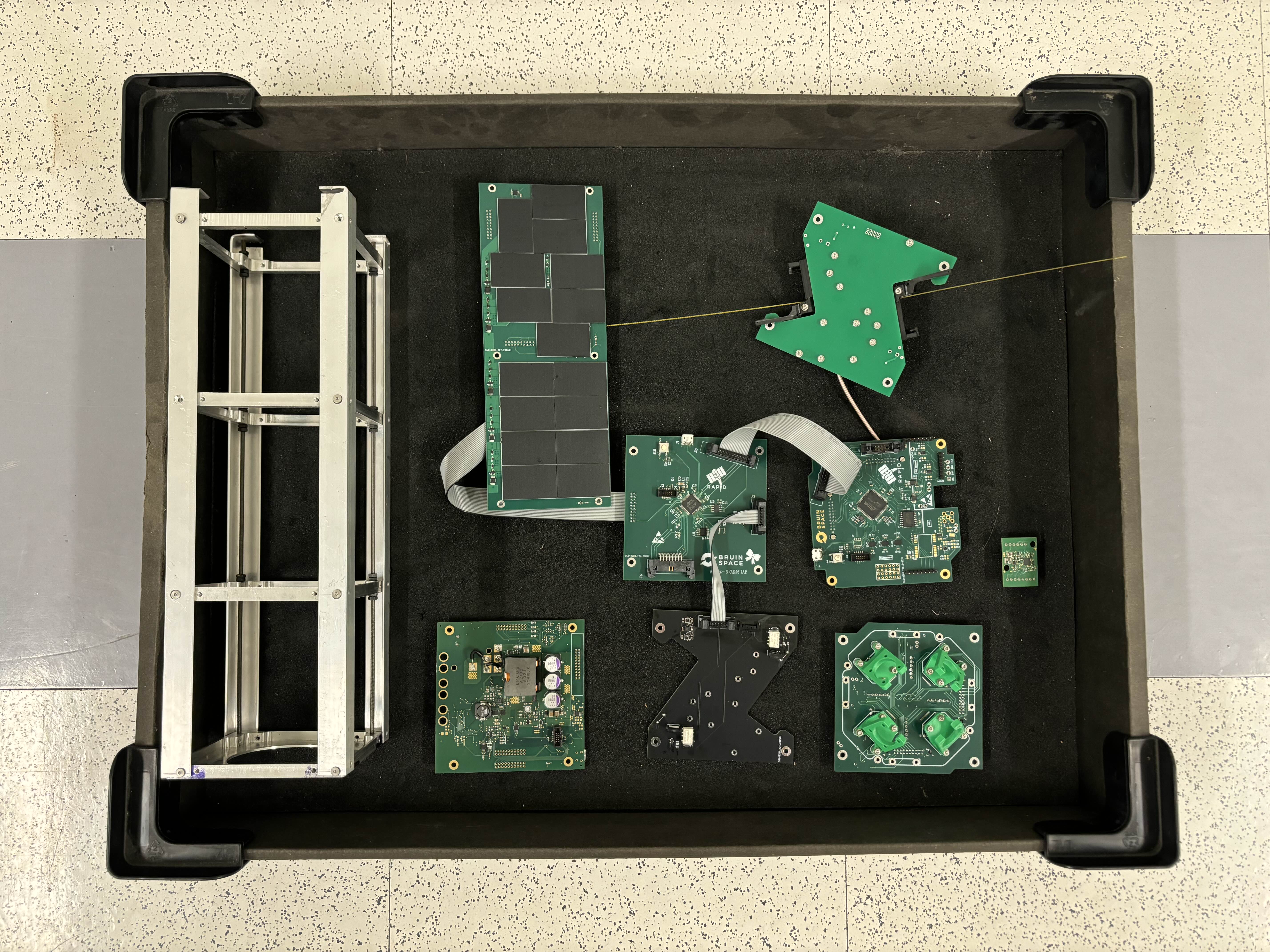
Boards designed in-house with 4 subsystems containing MCUs running our flight software developed from the ground up.
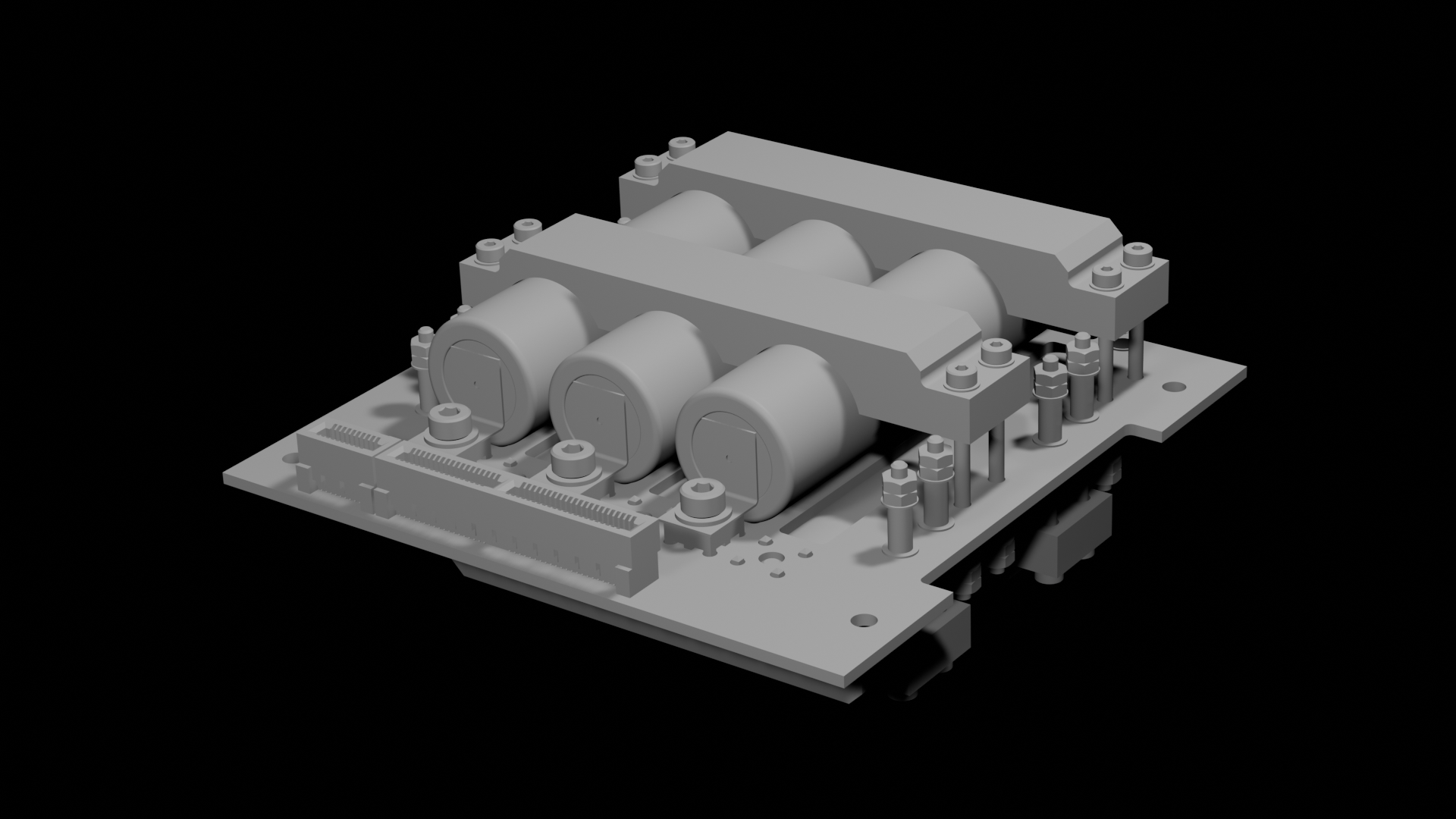
2s3p 18650 Li-ion pack powered by 4 fixed solar panels. Provides 3V3, 5V, and a 12V bus with 130W (28Wh) pulse capability.

Command and telemetry link operating through UHF communication at 432 MHz with a deployable bent dipole antenna.
High-power 12V system designed for scientific research, and a camera leveraging our ADCS for observation.
Through inspiration by a former partnership with a lab working on an ion thruster, we created the current idea, design, and plan for Project Rapid as it is now.
Finished initial design of flight PCBs and manufactured first chassis prototype.
Finalized structuring of intersubsystem communication and developed foundational modules for testing and writing flight software.
Developed TRIAD algorithm for attitude estimation and an MEKF for noise reduction and propagation from the estimate.
Created a PD controller for one reaction wheel in Simulink and implemented it in flight code.
Build and run robust simulations for various trajectories and conditions.
Incorporate both the reaction wheel and magnetorquer control systems in a fully simulated ADCS.
Develop code to determine and control attitude through our custom algorithms and drivers.
Integration of all PCBs and components with chassis.
Detumble, stabilize, and begin communication with ground.
Collect data from our ground station and perform research and experiments.

Project Manager

Chief Engineer

Electrical Lead

Mechanical Lead
Mechanical Lead

Operations Lead

Software Lead